NOPA
Size
3m x 3m x 3m
Location
Santralistanbul, Bilgi University, Istanbul
Date
August 2017
Collaboration
NOPA - Non Orthogonal Planar Assemblies - International Summer School was organized by Istanbul Bilgi University and was supported by ETH Zurich and NCCR Digital Fabrication from Switzerland. Program coordinators from Istanbul Bilgi University were Prof. Dr. Şebnem Yalınay Çinici and Dr. Evren Aysev Deneç. The tutors from Istanbul Bilgi University were Cemal Koray Bingöl, Gamze Gündüz and Leyla İlman including the collaborators, Oğul Öztunç and Hülya Oral. The tutors and lecturers from ETH Zurich and NCCR Digital Fabrication were Selen Ercan, David Jenny, Orkun Kasap and Luka Piskorec including the guest crits and lecturers Hannes Mayer from ETH Zurich and Dr. Ralph Bärtschi from ROB Technologies AG. The students of the International Summer School were Aylin Güler, Foad Sarsangi, Nilay Öztürk, Meryem N. Yabanigül, Mevan Bacgeroğlu, Emre Taş, Berk Ekmen, Bilge Kardelen Bekiroğlu, Derya Çiftnamlı, Parhes Deni Çakıridis, Deniz Hüray Tuğcu, Ecem Kırtaş, Saadet Yüncü, Semen Tanrıverdi, İlayda Turan, Hüsnü Yücel and İsmail Kocataş.
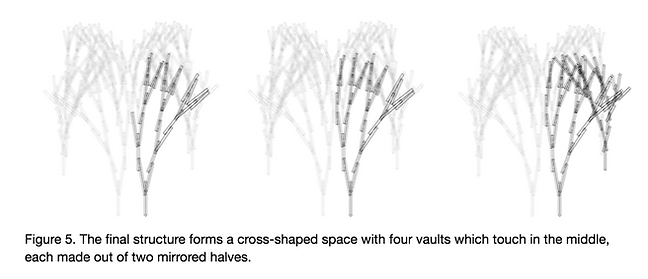
The design explorations of different groups converged into a final proposal forming a cross-shaped space with four symmetrical vaults, each made out of two mirrored halves forming continuous ridges (Figure 5). The whole structure thus comprises of only two unique parts which are each copied four times. The half-vault parts are created by truncating a branching tree structure generated by the computational setup in Grasshopper Python. These truncated parts were then mirrored, copied and rotated to create the architectural space of the pavilion. Length of the branching members, angle of rotation, number of branching iterations and subsequent arrangement into a functioning whole through mirroring and copying were all parametrized in Grasshopper. The fine-tuning of the parameters allowed to achieve the optimal results in regards to the fabrication constraints (such as the reachability of the robot arm, steepness of angles that can be cut on the table saw, minimum and maximum length of members, etc.). The main challenge for the robotic fabrication process was to develop an intuitive path-planning procedure that allowed to generate the sometimes complex robotic movements to approach and place timber elements without collisions. For this, a half-automated strategy was implemented, where students could manually switch between different possible generated paths and get an immediate feedback through simulation.